
")

Weil ich derzeit sowieso kaum zum Fotografieren komme, müssen die Abende eben mit Basteleien verbracht werden. Ich besitze ja bereits einen Remotehead, aber der ist zu schwer und zu groß, um ihn als kleine Einheit mitzunehmen und dann zu verstecken. Deswegen muss eine neue Lösung her - und die nennt sich "Soligor Motorschwenkneiger".
Das Gerät hält 2,7kg - bei einem Eigengewicht von nur 1kg. Es schwenkt 340°C (wobei es Umbauten für 360°C gibt) und neigt +/- 15°C. Das sollte ausreichen für die meist kleineren Korrekturen. Einen Haken hat die Sache aber - ein Kabel zur Fernsteuerung. Kabel sind immer schlecht: sie müssen aufwendig verlegt werden und wiegen nicht unerheblich. Nach ein bisschen googlen bei Bing fand sich natürlich jemand, der herausgefunden hat, wie der Kopf anzusteuern ist.
Man könnte es ganz klassich über eine RC-Fernsteuerung aus dem Modellbau machen. Damit kenne ich mich aber nicht aus und die Lösung mit einem Microcontroller gefällt mir einfach besser. Mittel der Wahl ist der kleine Arduino Uno.
Für Arduino gibt es sog. XBee Module - Out-of-the-Box serielle Datenübertragung per Funk. Und weil wir ja sowieso schon seriell arbeiten, eignet sich als Steuerung ein Wii Nunchuck perfekt - für den es auch schon eine Menge an fertigen Libraries für Arduino gibt.
Aber zuerst: die Teileliste.
 Sender:
Sender:
- Arduino UNO
- Arduino Wireless Proto Shield
- DFRobot LCD Keypad Shield v1.0
- XBee S1 Modul
- Nunchuck Adapter
 Empfänger:
Empfänger:
- Arduino UNO
- Arduino Wireless Proto Shield
- XBee S1 Modul
- YwRobot I2C Display 16/2
- 2,5mm Stereo Buchse

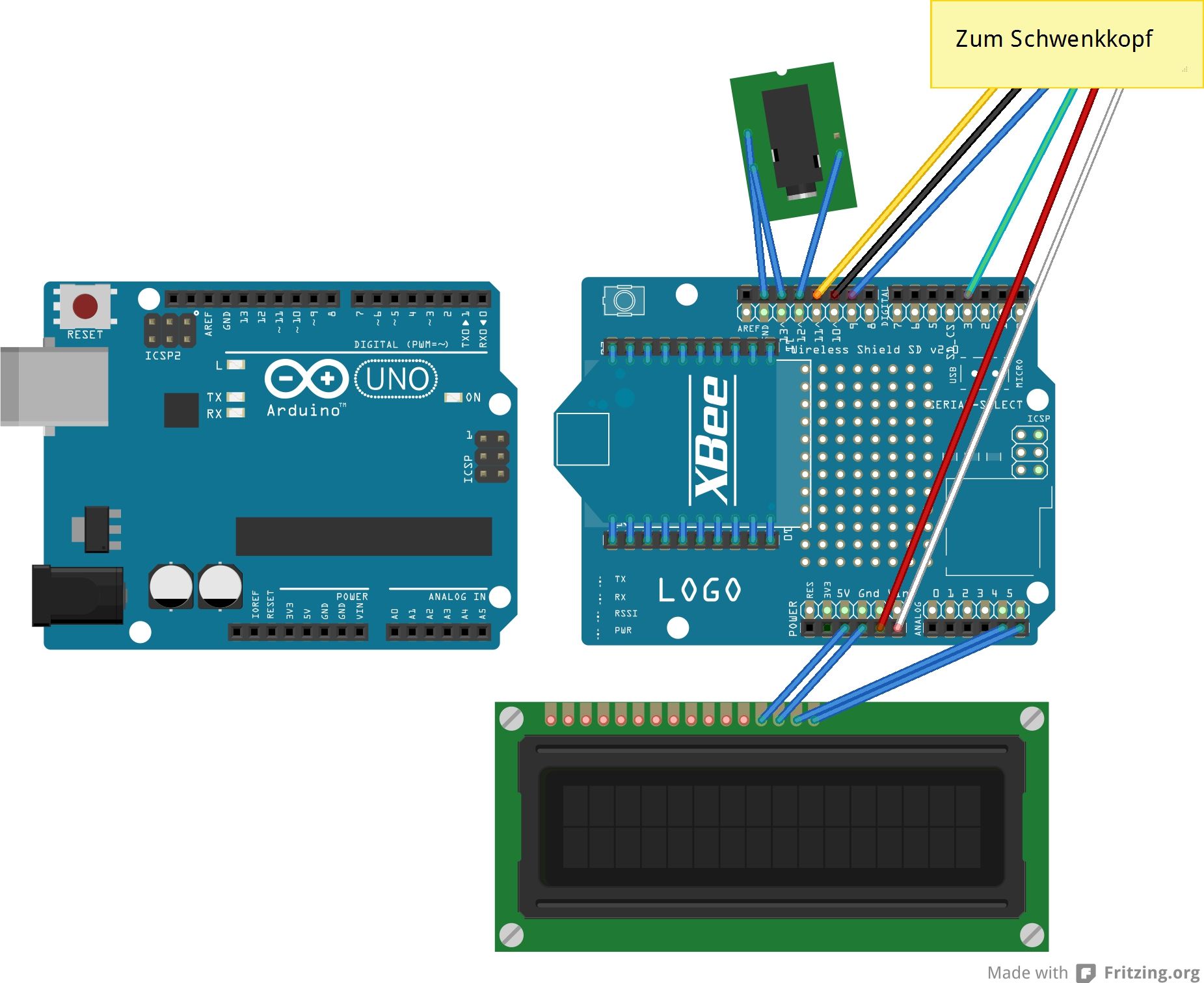
Ganz klassisch werden die einzelnen Module einfach aufeinander gesteckt. Der Nunchuckadapter bekommt Kontakt zu den Analogen Inputs 2-5 des Senders, die Klinkenbuchse wird beim Empfänger an Ground, D13 und D12 angeschlossen und die Kamera auslösen, wenn der Z-Button des Nunchucks gedrückt wird.
Für den Nunchuck sowie für das LCD I2C-Display und das LCD-Keypad-Shield gibt es fertige Libraries. Ich verwende WiiChuck und LiquidCrystal_I2C. Je nach Hersteller der Teile kann es recht schwierig werden, die richtige Library zu finden - aber wer googlet, der findet!
XBee funktioniert out of the box, jeder serielle Befehl, der per Serial.print ausgegeben wird, kommt beim Empfänger an. Die Wahrscheinlichkeit, dass andere XBee-Module in der Nähe sind, ist sehr gering, so dass ich auf Codierung/Verschlüsselung verzichte. Wichtig: bei aufgestecktem XBee funktioniert der Upload auf den Arduino nicht, weil die serielle Schnittstelle bereits "blockiert" ist. Also immer erst abziehen, dann per USB verbinden.
Den Programmcode kann man am Ende des Artikels ansehen. Eigentlich eine recht simple Lösung, und ich bin weiß Gott kein gute Programmierer. Aber es spielt, und das passt.
Mir war es bei dem Projekt wichtig, auch immer eine Rückmeldung zu haben, was der Empfänger gerade tut. Sobald er außer Reichweite ist oder keine Kommunikation mehr möglich ist, zeigt der Empfänger n/a und man ist so gewarnt!
Außerdem ist denkbar, am Empfänger verschiedene Sensoren anzubringen (Entfernung, Lichtschranke, Mikrofon o.ä.), die dann eine Rückmeldung an den Fotografen im Tarnzelt geben und ihn sozusagen wachrütteln.
Weitere Bilder auch vom Kopf gibt es bald - es gilt erst einmal, alles in Gehäuse zu verbauen.
UPDATE 19.08.2013:
Die Software hat natürlich nicht sofort richtig funktioniert, deswegen unten die aktualisierten Files. Außerde: Das Gehäuse ist fertig, aus Plexiglas, was ich mir online von einem Laserservice habe zuschneiden lassen. So sieht die gesamte Lösung jetzt aus:



UPDATE 01.07.2014:
Weil mir XBee als System für größere Entfernungen nicht ausreichte , musste mittlerweile umgebaut werden. Ich habe mir dazu eine einfache 2,4 GHz Funkfernsteuerung aus dem Modellbau geholt und die Ausgänge des Empfängers über Arduino ausgewertet. Der Empfänger lässt sich jetzt also umschalten auf Empfang zwischen XBee (mittlerweile XRF - höhere Reichweite, störungsunanfälliger) und 2,4 GHz Fernsteuerung. Problem: Die Funksteuerung hat sehr blöde Störungen in meine Kamerakontrolle per WLAN eingestreut (beide laufen auf 2,4 GHz), dafür absolut zuverlässig und auch auf Entfernungen, die WLAN nicht mehr erreicht. Ich nutze also für "vor dem Zelt" XRF mit WLAN-Kontrolle und für "far far away" die Funkfernsteuerung mit einem 800MHz Kamerafunkauslöser von Hähnel.







